Опубликовано23.03.2026
Обновлено29.05.2026
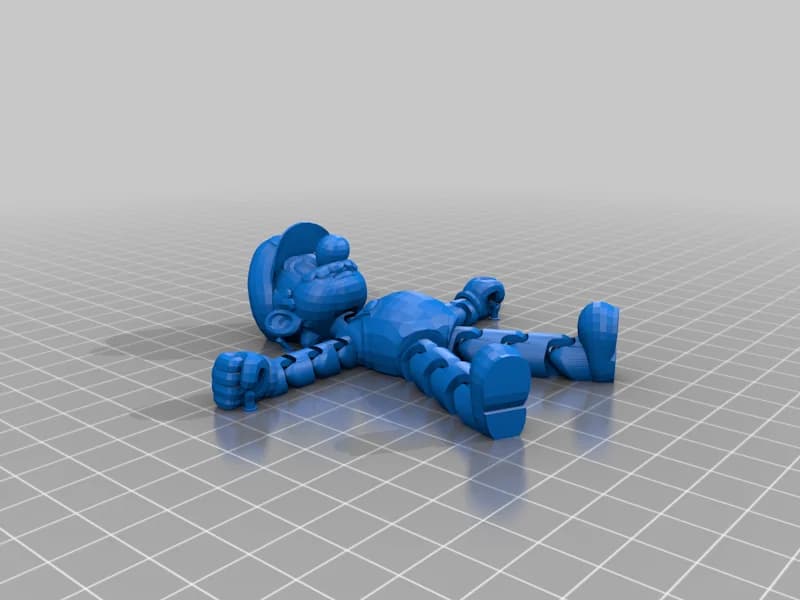
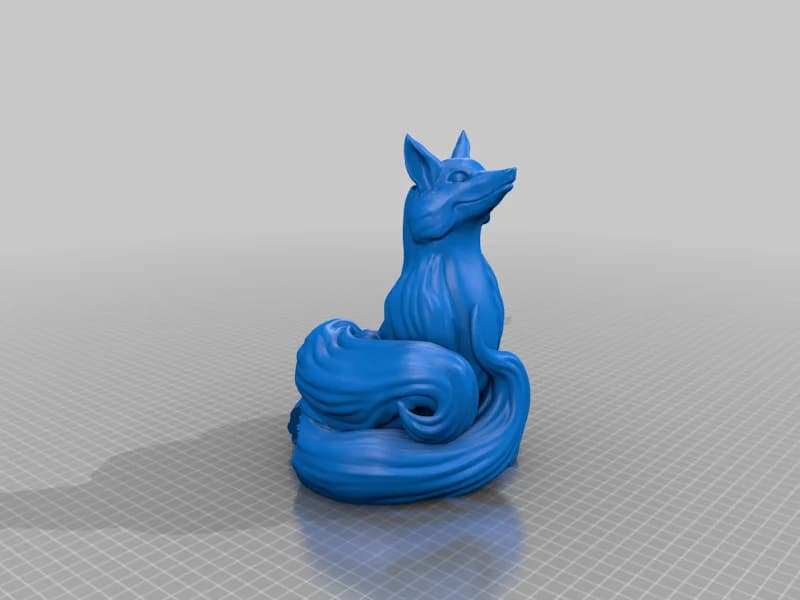
Другие модели автора
Все модели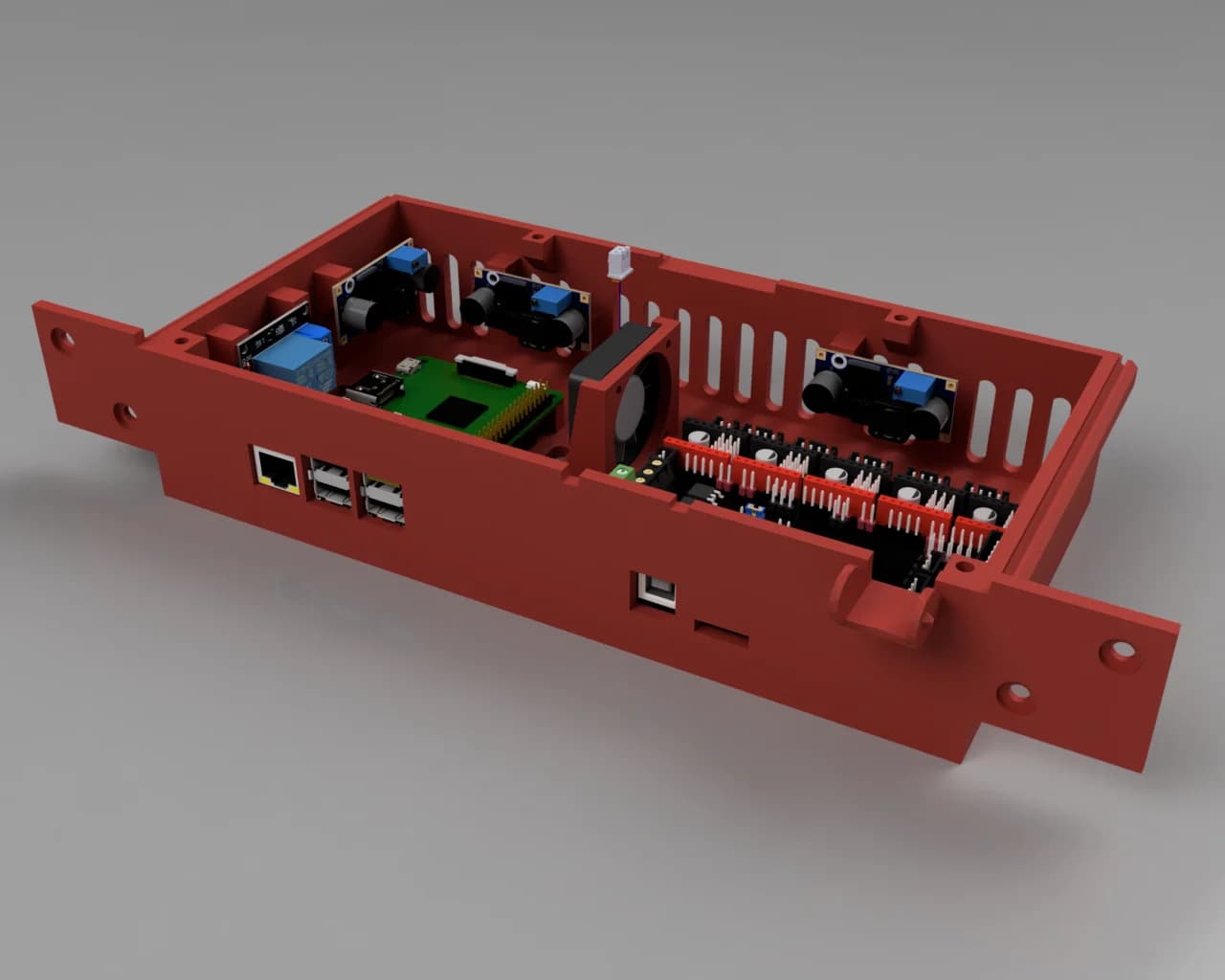

Скачать Распечатанная рука робота — 3D-модель для печати на 3D-принтере
Скачать Распечатанная рука робота — 3D-модель для печати на 3D-принтере. Файл загружен автором Katalog3D на маркетплейс Каталог3Д и доступен для скачивания в формате STL или 3MF.
Лицензия. Перед использованием ознакомьтесь с условиями лицензии в карточке модели. Одни файлы разрешают только личную печать, другие — коммерческое использование. Подробнее — в разделе лицензии.
Смотрите также: другие модели этого автора, похожие файлы по тегам — роботы, robotics, robot arm, stepper motor, stepper robot.
